INTRODUCTION
Gait is defined as the arrangement in which limbs move during locomotion. Standing, walking and running properly involve a sequence of complex actions; during which bodies integrate sensory feedback from several systems of the body to properly control and coordinate muscles to prevent falling. Gait analysis is a descriptive tool that can help show how the systems of the body contribute to the way one stands, walks or runs and can help determine underlying problems.
Gait analysis allow for frame by frame observation of motion, kinetics and kinematics enabling further insights into joints and the motion created. During gait analysis joint motion, electromyographic activity of the muscles, and the forces both created by and acting upon the body during human locomotion can be precisely recorded, measured and evaluated. Also, these measurements may be coordinated in time giving researchers and physicians the ability to compare between modes of evaluation (such as the walking on a treadmill versus overground walking), and thereby recommendations creating an accurate assessment of a person’s ambulatory ability. This quantitative method utilizes motion capture systems, electromyography, and force platforms to identify gait abnormalities, after which a treatment can be recommended.
The utilization of treadmills in biomechanics laboratories that are typically equipped with floor mounted force plates can be beneficial. Treadmills uses a small area allowing for a large volume of steps to be achieved, and walking speed to be controlled. However, acquiring instrumented treadmills with a built in force plate(s) – may not be financially feasible for many general purpose biomechanics laboratories; additionally some instrumented treadmills only measure the vertical component of GRF.
A number of studies were conducted to investigate the overground and treadmill walking. Belli, et al.1 validated a newly designed treadmill ergometer which measures vertical and horizontal GRFs during walking. Li and Hamill,2 examined the vertical force component when approaching the gait transition point. Also, Dierick, et al.3 developed an instrumented treadmill from a commercially available treadmill with 3D strain gauge force transducers. Lake and Robinson,4 compared walking kinematics in two shoe conditions in overground and treadmill walking. Riley, et al.5 showed that measures of GRF using instrumented treadmills are adequate for inverse dynamics analysis.
Goldberg, et al.6 tested whether or not there would be any difference in the generation of anterior/posterior propulsion during treadmill and overground walking. Riley, et al.7 evaluated and compared kinematics and kinetic parameters for treadmill running and overground running. Sohn, et al.8 compared treadmill walking and overground walking at the same condition. Fellin, et al.9 compared the variability of treadmill and overground running through a 3D lower limb kinematic analysis.
The purpose of this study was to examine a method by which the components of Ground Reaction Force (GRF) are measured through placing a treadmill (Kistler’s Gaitway 9801A© Instrumented Treadmill) over four floor-mounted force plates. The GRF measured during the treadmill walk was compared to GRF measured in overground walking. The second objective of the study was use a regression approach to examine the association of GRF components during treadmill walking with measurements that can be obtained from the subject overground walk.
METHODS
Subjects and Procedures
Twelve male college students aged 18 to 37, who indicated in a survey that they do not have any history of musculoskeletal injuries, were recruited. The subjects’ age, height, and weight were (Mean±Standard Deviation) 20.6±5.2 years, 176.53±10.17 cm, and 81.08±17.28 kg, respectively. Table 1 details the demographic data of the subjects.
Table 1. Demographic Data of Participating Subjects
|
Subject
No.
|
Age
(years)
|
Height
(cm)
|
Weight
(kg)
|
Average Walking Speed (km/hr)
|
|
1
|
19
|
180.3
|
72.6
|
4.5
|
|
2
|
37
|
165.7
|
86.6
|
3.4
|
|
3
|
20
|
190.5
|
98.9
|
3.1
|
|
4
|
19
|
185.4
|
82.8
|
3.2
|
|
5
|
18
|
165.1
|
61.7
|
2.7
|
|
6
|
20
|
171.5
|
69.2
|
3.7
|
|
7
|
18
|
166.4
|
55.3
|
4.2
|
|
8
|
20
|
165.1
|
74.4
|
2.9
|
|
9
|
18
|
183.5
|
78.9
|
3.0
|
|
10
|
20
|
193.0
|
120.7
|
3.4
|
|
11
|
19
|
179.1
|
83.0
|
4.0
|
|
12
|
19
|
172.7
|
88.9
|
3.8
|
In accordance with the University of Miami Institutional Review Board’s, all participants were briefed in advance about the experimental procedure of the study, and each signed a written consent form in the beginning of the experiment.
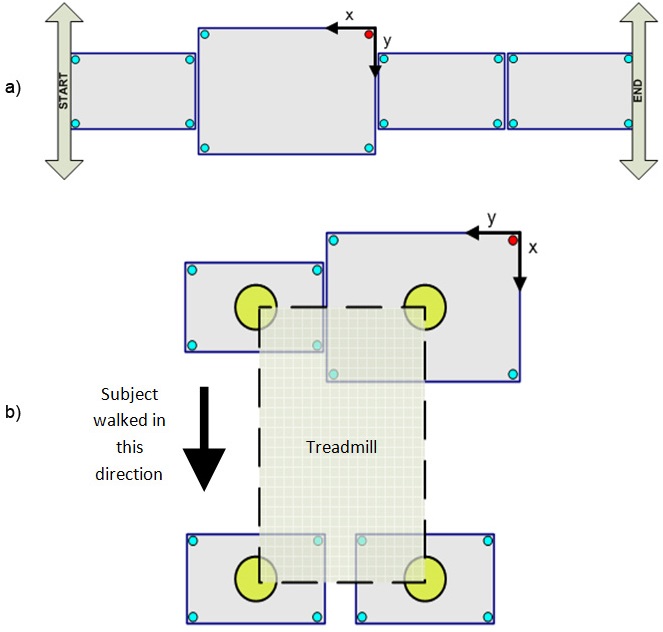
The University of Miami, Biomechanics Laboratory is equipped with four Kistler force plates: three Type 9281CA, and one Type 9287BA. Figure 1 shows the two arrangements of the force plates used in this study: overground walking and treadmill walking configurations.
Figure 1: a) Overground force plates arrangement and b) Treadmill force plate’s arrangement
The Biomechanics Laboratory utilizes a motion analysis technology by Oxford Metrics Group called Vicon Motion Capture System (www.vicon.com). It supports 64 channels of analog data and integrates and synchronizes ten infrared cameras and four force plates. A Kistler’s Gaitway© Instrumented treadmill, Type 9810AS10 was utilized in this study. It measures the vertical force (FZ) component, and the Center of Pressure (CoP) for complete consecutive foot strikes during walking and running. The treadmill uses a patented tandem force plate design and a patented algorithm to distinguish left and right foot strikes. The treadmill is accompanied by data collection software, Gaitway (Version 2.06, build 2013). In this study the Gaitway software was used only to distinguish the dominant foot strike of each subject. Subjects were first asked to walk at their normal speed across the floor-mounted force plates. Both the walking speed and GRF components were collected. The subject then was asked to walk on the treadmill that is placed over the floormounted force plates. Each of the four treadmill legs was centred on a floor-mounted force plate. The treadmill speed was set to the subject’s average speed recorded by Vicon during the overground walking trials. Force data were collected by the instrumented treadmill as well as by the four floor-mounted force plates. Vertical force component, (FZ) was measured by both the instrumented treadmill and floor-mounted force plates. The floor-mounted force plates captured both the anterior/posterior (FAP) and medial/lateral (FML) force components. Then the three components of the ground reactions forces, GRF, measured during a treadmill walk were compared with the three components of GRF measured during overground walking.
Overground Walking
Subjects were asked to walk barefooted through the Biomechanics Laboratory at their comfortable (normal) walking speed over floor mounted force plates (Figure 1A). Six randomly selected good trials were used in data analysis (a trial is considered “good” if the subject landed only one foot strike per force plate). Average walking speed for each subject was calculated using the time recorded by Vicon from the six selected trials.
Treadmill Walking
Before the subject’s treadmill walking trials were conducted, the force plates were rearranged (Figure 1B). Our proposed method positions the Kistler’s Gaitway Instrumented treadmill on top of the floor-mounted force plates such that each of the treadmill’s legs was centered on a single force plate. Subjects were asked to practice walking on the treadmill barefooted since they walked barefooted over the Laboratory’s ground and the treadmill’s speed was set to the subject’s average walking speed. Data was then collected from the floor-mounted force plates for a complete gait cycle. Data was recorded using Gaitway software and the Vicon Motion Capture System.
Treadmill GRF Components Regression Equations
The developed equations were used in an effort to provide biomechanics research laboratories with a tool to associate the different ground reaction force components with overground measurements for subjects walking over a treadmill without the need to acquire a more sophisticated treadmill equipped with force plates.
Terms studied for inclusion in the developed equations were: overground GRF, subject’s Height (H) and Weight (W), walking speed (S), Stride length (SrLength), Stride time (SrTime), Step length (SpLength), Step time (SpTime), and the point of the gait cycle terminal contact-foot off-occur (FO). The treadmill GRF regression equations were constructed first by developing a correlation matrix between each of the treadmill GRF component and all of the parameters of interest to determine which of these parameters to include in the each predictive equation.
These regression equations may be of use to any biomechanics research laboratory equipped with only two force plates and any commercial treadmill. The subject would first walk across the two force plate once to obtain his overground GRF. Then the subject’s weight and height as well as the overground reaction force components and the other gait parameters (walking speed, stride length, stride time, step time, step length, and foot off) would be implemented in the treadmill GRF regression equations to associate the treadmill GRF with these measurements.
RESULTS
Ground Reaction Forces
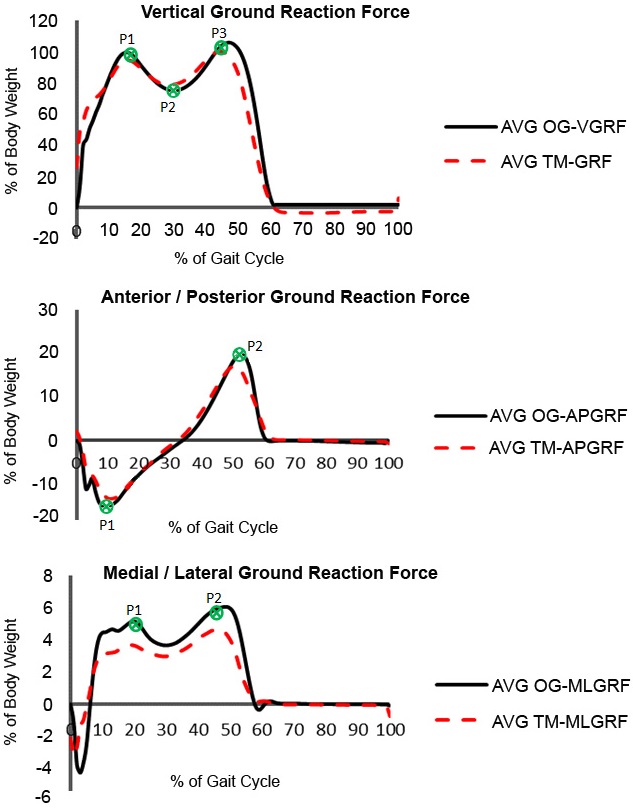
The pattern and amplitude of force-time curves for all components of ground reaction force obtained during treadmill walking were similar to data obtained during overground walking (Figure 2). In both treadmill walking and overground walking we can observe an increased absolute forces response during loading for VGRF (P1), MLGRF (P1), and APGRF (P1) and through push off for VGRF (P3), MLGRF (P2), and APGRF (P2). Also, minimal forces below body weight are apparent during mid-stance for VGRF (P2). These similarities indicate that acceleration patterns are alike during the stance phase of the gait cycle.10,11
Figure 2: Force-time curves for all ground reaction force components during overground and treadmill walking
General Linear Model (GLM) for Repeated Measures
GLM Repeated Measures is a statistical procedure used to model dependent variables measured at multiple times using analysis of variance. It tests the main effects on repeated measures of between-subjects (grouping) factors, the main effects of within-subjects factors such as measurement times, interaction effects between factors, covariate effects, and effects of interactions between covariates and between-subjects factors. Table 2 summarizes the results obtained from the GLM for repeated measures analysis.
Table 2. Results Obtained from GLM for Repeated Measures
|
Response Variable
|
Walk Type
|
Subject*Walk Interaction
|
|
VGRFP1
|
p=0.780
|
p=0.013*
|
|
VGRFP2
|
p=0.061**
|
p=0.000*
|
|
VGRFP3
|
p=0.000*
|
p=0.000*
|
|
APGRFP1
|
p=0.090**
|
p=0.000*
|
|
APGRFP2
|
p=0.4662
|
p=0.000*
|
|
MLGRFP1
|
p=0.139
|
p=0.245
|
|
MLGRFP2
|
p=0.000*
|
p=0.000*
|
*Significant at p=0.05
**Significant at p=0.10 |
The GLM for repeated measures suggests that at p=0.05, the third peak of FZ and the second peak of FML significantly differ between treadmill walking and overground walking. At a higher p value (p=0.10), the analysis suggests that the second peak of FZ (p=0.61) and the first peak of FAP (p=0.09) also significantly differ between treadmill walking and overground walking. The higher p-value is considered here due to small sample size. In addition, the analysis reveals that the interaction between subjects and each walk (Subject Walk) is statistically significant for all response variables except for the first peak of FML.
The results of the GLM Repeated Measures model indicate that the overground walking observations were significantly different from the treadmill walking observations for some of the measurement types, but not others. Specifically, at p=0.05, the third peak of the vertical ground reaction force and the second peak of the medial-lateral ground reaction force were significantly different in overground gait from treadmill gait. The model also indicated that the Subject/Walk Type interaction was significantly different at the p=0.05 level for all response variables but one: first peak of medial-lateral ground reaction force (MLGRFP1).
The analysis of the data did not reveal statistical differences in the anterior-posterior component of the GRF (APGRFP1 and APGRFP2) and in the early-stance and mid-stance peaks of the vertical GRF (VGRFP1 and VGRFP2) between treadmill and overground walking. Our findings are in agreement with the literature.5,12 Kram, et al12 constructed a force treadmill to measure and record vertical, horizontal and lateral components of the GRFs (Fz, Fy and Fx, respectively) and moments (Mz, My and Mx, respectively) exerted by walking and running humans. Riley, et al.5 evaluated and compared kinematic (body segment orientations and joint angles) and kinetic (net joint moments and joint powers) parameters for treadmill running and overground running. Both studies found that anterior-posterior and vertical components of the GRF in treadmill and overground locomotion to be very similar.
Statistical differences between treadmill and overground walking were found during late-stance for vertical ground reaction force (VGRFP3) and medial lateral ground reaction force (MLGRFP2) (p<0.05). During push-off-occurring in latestance-vertical ground reaction force peaks (VGRFP3) were less in treadmill walking than in overground walking by 5-6%. The medial-lateral ground reaction forces peaks (MLGRFP2) were also less in treadmill walking than in overground walking by 1-2%. The force peaks during push-off are related to the extension of support limb during late-stance. Not extending limb fully would result in a shorter stride length.
Several authors have reported decreased stride length as one of the differences between treadmill and overground walking. Stolz, et al.13 noted that step frequency increased by 7% in adults and by 10% in children while stride length and stance phase decreased during treadmill walking in comparison to overground walking. Alton, et al.14 reported that stance phase was shortened significantly in treadmill walking when human locomotion was analyzed on the treadmill and on the ground for identical walking speed. Others also reported similar variability of steps and several kinematic measurements.15–17 The reported decreased stride length in treadmill walking in these studies supports our outcomes of decreased force peaks during push-off.
Another explanation for the reduced peaks of ground reaction force in late stance would be the effect of treadmill belt speed fluctuations on the subject. Braking (shear) forces are at maximum during limb loading in early stance and frictional forces increase, as a result the belt speed slows down causing the subject to exert negative work on the treadmill. White et al.11 warned that “the potential for lower push-off forces should be considered when interpreting treadmill locomotion particularly for higher speeds and for heavier individuals since belt friction forces will increase with body mass”. van Ingen Schenau,18 indicated that it is required for the belt speed of the treadmill to be constant to obtain similarity between treadmill and overground gait. Savelberg, et al.19 observed a 5% decrease in belt speed in the braking phase in high-power treadmill.
Because further insight into this interaction was needed, main effects plots and interaction plots (Figure 3) were generated to be analyzed alongside scatterplots of response variable versus subject. In these plots, Walk 1 represented the average of six overground walks while Walk 2 represented one treadmill walk. The goal was to investigate whether or not the presence of the subject-walk interaction influenced results.20 In examining the main effects plots (Figures 3), the interactions plots, and the scatterplots of response variable versus subject, it is seen that overground walking (Walk 1) has higher response variables values for some subjects, and treadmill walking (Walk 2) has higher response variables values for others. Hence, the presence of an interaction doesn’t influence the results in the Walk Type column of Table 2 (the results obtained from GLM for repeated measures).
Figure 3: Main effects plots for GRF components
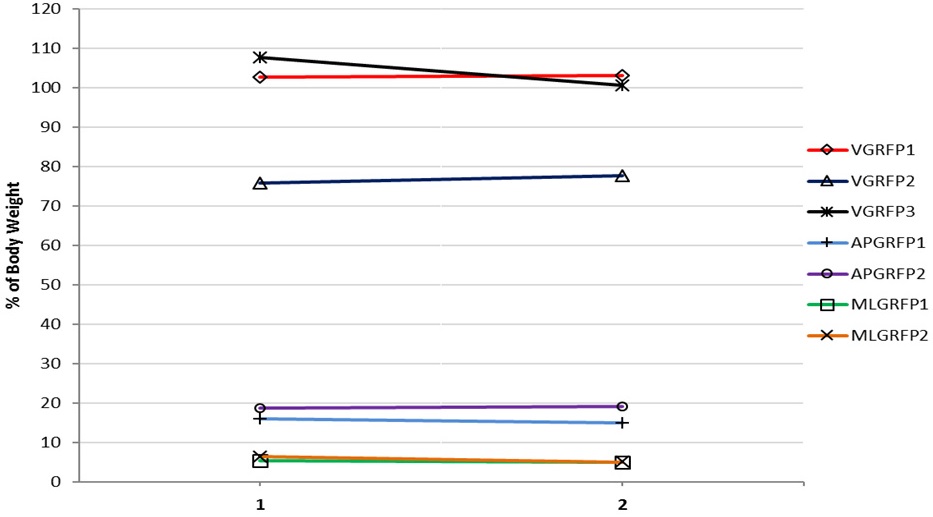
In examining the values of the Walk Type column of Table 2, GLM for repeated measures indicate that for VGRFP1, VGRFP2, APGRFP1, APGRFP2 and MLGRFP1, there is no overall statistically detectable differences between the two walking styles at p=0.05. However, that much variability exists among the subjects must be noted.
Main effects plots and interaction plots for each peak in the components of GRF as well as scatter plots of response variable versus subject were used to study if the existence of this interaction swayed the results. Although high variability among the subjects exists, and subject/walk type interaction is statistically significant, the plots suggest that the presence of such interaction did not influence the results in the walk type. In other words, the inter subject variability did not influence whether the overground gait is significantly different from treadmill gait or not. Since the small sample size might restrict the power of analysis to detect differences even if they exist then we should note that the results of the GLM for repeated measures test are suggestive of existence of statistical differences that did not meet the threshold of p=0.05 statistical significance between overground gait and treadmill gait in the second peak of the vertical ground reaction force (VGRFP2) and the first peak of the anterior-posterior ground reaction force (APGRFP1).
Treadmill GRF Components Regression Equations
A total of five treadmill GRF regression equations were developed. The treadmill GRF components were: VGRFP1_TM, VGRFP2_TM, VGRFP3_TM, APGRFP1_TM, and MLGRFP1_TM. The terms included in each equation were based mainly on the correlation between each term and the corresponding treadmill GRF component. The developed equations are shown below (equations 1-5).
VGRFP1_TM = -11.2 + 1.11VGRFP1_OG (adjusted-R2 = 75.9%) (1)
VGRFP2_TM = -49.2 + 2.23FO (adjusted-R2 = 37.5%) (2)
VGRFP3_TM = 142 + 0.363VGRFP3_OG – 140 SpTime (adjusted-R2 = 59.9%) (3)
APGRFP1_TM = 113 – 1.25FO – 47.7 SpLength (adjusted-R2 = 29.6%) (4)
MLGRFP1_TM = -11.6 + 0.292FO (adjusted-R2 = 40.1%) (5)
(FO: foot off, SpTime: step time, and SpLength: step length)
CONCLUSIONS
The aim of this research was to examine a method by which components of GRFs are measured by placing a treadmill on top of four floor mounted force platforms. The use of treadmills has always been popular in physical rehabilitation centers, and it is becoming increasingly more common in gait laboratories. Such laboratories are typically equipped with floor embedded force platform(s) allowing the analysis of only one or two consecutive steps. Treadmills allow for the collection of multiple consecutive steps in a small space, and the ability to study walking patterns over a prolonged period of time. Collecting forces exerted during locomotion allows for kinetic analyses during treadmill ambulation. However, acquiring instrumented treadmills with a built in force plate(s) may not be financially feasible for many general purpose biomechanics laboratories; additionally many instrumented treadmills only measure the vertical component of GRF.
The second objective of the study was to develop a set of regression equations for a subject walking on a non-instrumented treadmill based on the subject’s gait parameters while walking on floor embedded force plates. Five equations were developed to estimate associations between components of GRF in treadmill walking and various measurements which can be obtained during an overground walking trial. The equations can be used for Vertical Ground Reaction Force Peak 1 (VGRFP1), Vertical Ground Reaction Force Peak 2 (VGRFP2), Vertical Ground Reaction Force Peak 3 (VGRFP3), Anterior-Posterior Ground Reaction Force Peak 1 (APGRFP1), and Medial-Lateral Ground Reaction Force Peak 1 (MLGRFP1) for treadmill walking.
CONFLICTS OF INTERERST
None.